
Modern UAV autonomy is most valuable when it remains aligned with human intent. At UHUAV, we develop mission systems in which the operator defines the objective, route, operational limits, payload actions, and response rules, while the aircraft executes the approved plan with a high degree of autonomy.
This approach combines operator-defined missions with fully autonomous execution. It reduces repetitive piloting workload without removing human authority from the operation. For security, surveillance, critical infrastructure protection, public safety, and emergency response, that balance is essential: the aircraft must work efficiently, but the operator must retain visibility, decision-making authority, and the ability to intervene when conditions change.
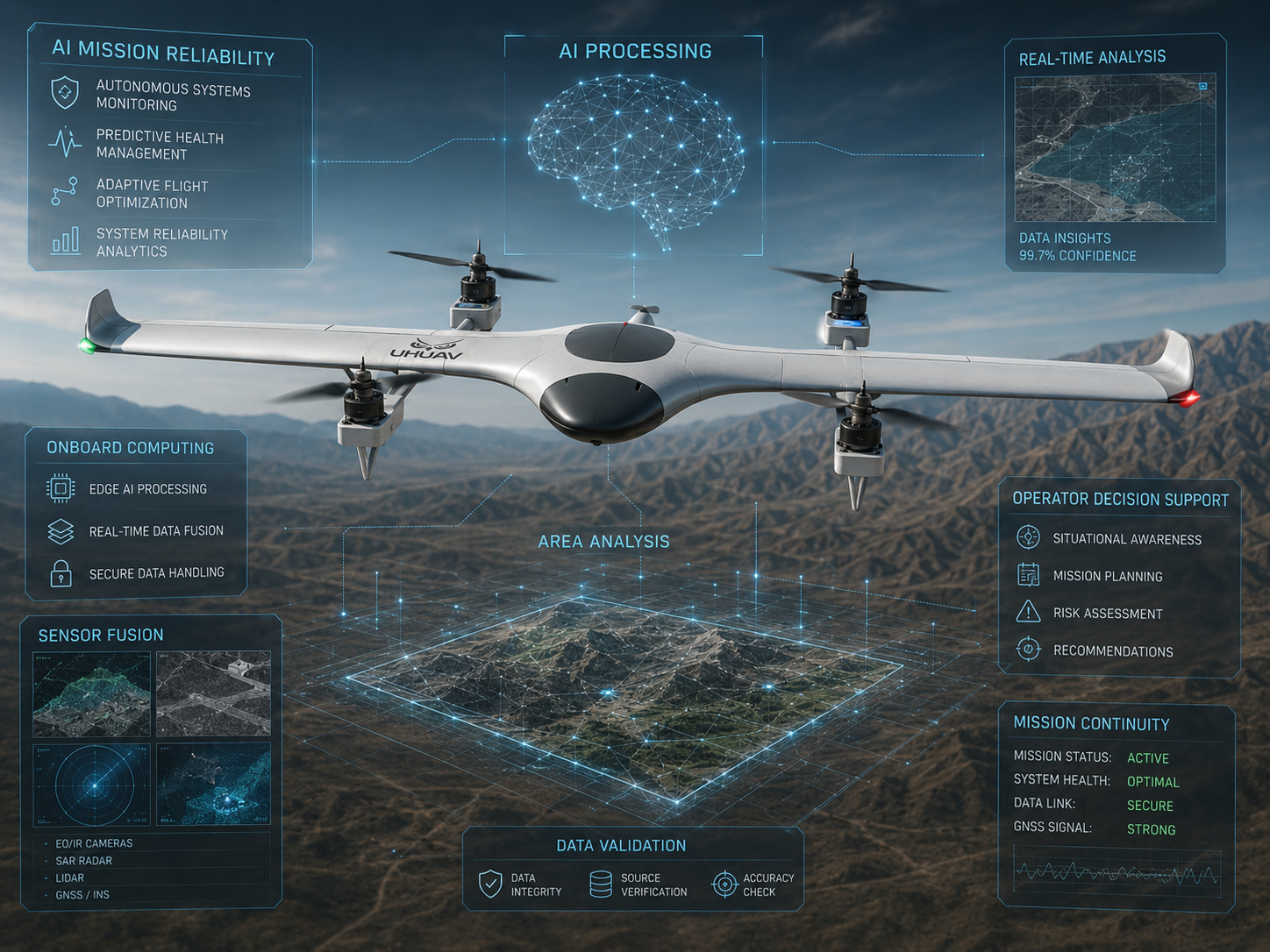
Rather than treating autonomy as simple waypoint navigation, UHUAV approaches it as a complete mission architecture that connects the airframe, flight controller, onboard computer, communication link, payload, artificial intelligence, and ground-control interface.
What Is an Operator-Defined Autonomous Mission?
An operator-defined mission begins with a human-selected operational goal. Before launch, the operator can configure:
-
Flight route and waypoints
-
Altitude, speed, and loiter parameters
-
Geofences and restricted areas
-
Observation or patrol zones
-
Payload activation points
-
Camera orientation and tracking behavior
-
Alarm and event-response rules
-
Communication-loss procedures
-
Return-to-home and landing logic
Once the mission has been reviewed and approved, the UAV can perform automated takeoff, transition into the planned flight profile, complete assigned tasks, and return according to the configured safety logic.
The operator does not disappear from the process. Live telemetry, aircraft health, route progress, video, payload status, detections, and alerts remain visible throughout the mission. The operator can supervise execution, modify the plan where permitted, or assume direct control when required.
This model provides the efficiency of autonomous drone systems while preserving accountability and operational control.
Why This Matters for Security and Surveillance
Security missions often require repeatable patrols, rapid verification, persistent observation, and immediate access to reliable information. Manual flight alone can force one person to divide attention between aircraft control, camera operation, navigation, communications, and interpretation of the scene.
An autonomous surveillance UAV can handle the repetitive flight layer while the operator concentrates on mission decisions. This can improve route consistency, reduce workload, and create a more structured response to alarms or changing field conditions.
For example, a surveillance drone assigned to a large industrial site can patrol predefined sectors, inspect selected access points, and provide live imagery to the security team. If an alarm is generated, the mission can be updated so the aircraft moves toward the event location, begins observation, and holds a safe position while the operator evaluates the situation.
The same mission concept can support a perimeter security drone, a border surveillance drone, or a public safety drone, with different routes, sensors, payloads, and operating rules.
Mission Planning for Repeatable Aerial Patrol
Repeatability is one of the main advantages of operator-defined autonomy. A security team may need to inspect the same fence line, pipeline, solar farm, port boundary, or remote road several times per day. By using a stored mission plan, the UAV can follow a consistent route and collect comparable observations during each deployment.
A mission plan can define:
-
Scheduled or on-demand patrol routes
-
Priority zones and observation points
-
Day and night mission profiles
-
Minimum safe altitude
-
Camera angle and zoom presets
-
Loiter duration over key locations
-
Automatic image or video capture
-
Return conditions based on battery level
-
Alternative routes for wind or airspace restrictions
This structure is useful for critical infrastructure protection because it turns aerial surveillance into a repeatable operational process rather than an improvised flight.
It also improves post-mission analysis. When the aircraft follows a consistent route, operators can compare imagery, detections, thermal signatures, and event records across different flights.
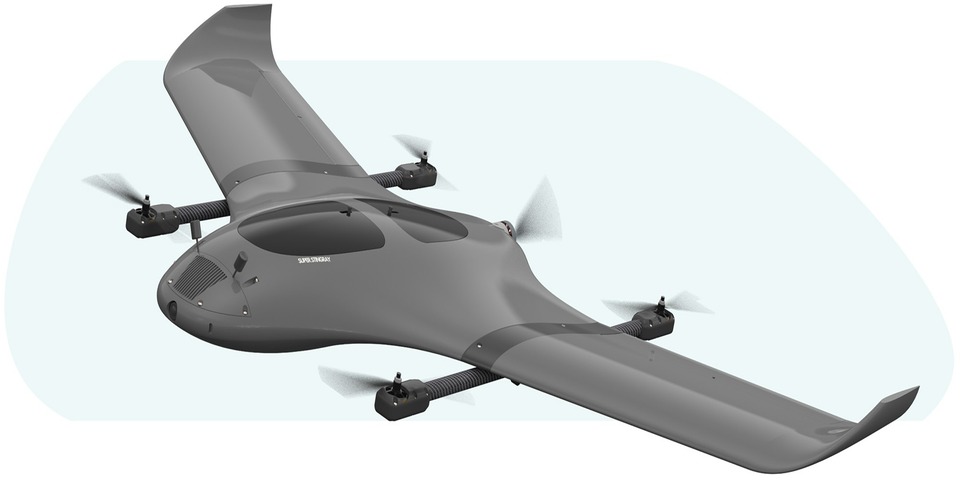
VTOL Autonomy for Wide-Area Operations
A VTOL drone for surveillance combines vertical takeoff and landing with the aerodynamic efficiency of fixed-wing flight. This enables deployment from confined locations without a runway while still supporting wide-area patrol and longer-distance observation.
For a long range surveillance drone, operator-defined mission planning is particularly important. The aircraft may travel beyond the immediate visual area of the launch point, pass through multiple patrol sectors, and operate with a stabilized imaging payload over remote terrain.
The mission logic must therefore coordinate:
-
Vertical takeoff
-
Transition to fixed-wing flight
-
Route execution
-
Payload operation
-
Loiter or observation patterns
-
Return flight
-
Transition to hover
-
Controlled landing
By integrating these phases into a unified mission plan, the platform can reduce operator workload and improve flight consistency. Actual range, endurance, and operational approval depend on the final airframe, payload, communication system, weather, terrain, and applicable aviation requirements.
Payload-Aware Autonomous Execution
Autonomy should not control only the aircraft. It should also coordinate the payload according to the purpose of the mission.
A custom drone payload may require power control, data communication, stabilization, trigger commands, recording logic, or operator interaction. UHUAV can develop mission workflows that connect payload behavior with location, time, detection events, and operator commands.
Examples include:
-
Activating an EO/IR gimbal at a designated observation zone
-
Switching from daylight video to thermal imaging at night
-
Pointing the camera toward a predefined coordinate
-
Starting high-resolution recording near a critical asset
-
Activating a spotlight over a search area
-
Broadcasting a warning through a loudspeaker
-
Enabling a communication relay during a field operation
-
Releasing approved emergency equipment at a defined location
A swappable drone payload architecture can allow the same aircraft to perform different mission profiles between flights. One configuration may operate as an EO/IR surveillance drone, while another may be configured as a thermal surveillance drone or an emergency-support platform.
The aircraft, payload, and mission software must be validated together. Payload mass, center of gravity, power consumption, data rate, aerodynamic effects, and safety requirements can all influence autonomous behavior.
AI-Assisted Detection and Target Tracking
UHUAV’s autonomy concept can be extended with onboard artificial intelligence and computer vision. A target tracking drone can use live video to detect and follow selected mission-relevant objects, such as people or vehicles, subject to sensor quality, operating distance, weather, lighting, and the selected model.
AI-assisted mission control can help:
-
Detect objects within a defined area
-
Track a selected target
-
Re-acquire a temporarily obscured target
-
Generate event markers
-
Associate detections with time and location
-
Alert the operator to changes
-
Support camera steering
-
Prioritize mission-relevant observations
Artificial intelligence should support the operator rather than replace operational judgment. The operator remains responsible for verifying detections and deciding how the mission should continue.
For surveillance operations, this approach can transform the UAV from a passive camera platform into an intelligent observation system that helps filter large amounts of visual information.
Rapid Incident Response and Drone as First Responder
Operator-defined autonomy also creates a foundation for rapid event response. A drone as first responder system can be assigned to a known launch location and dispatched toward an alarm or emergency coordinate after authorization.
The aircraft may arrive before ground personnel, transmit live imagery, identify access conditions, observe hazards, and help teams understand the scene before entering it.
Depending on customer requirements, aircraft capability, and local regulations, an emergency response drone can also support practical response functions through modular payloads. These may include:
-
Thermal observation
-
Target-area illumination
-
Loudspeaker warnings or instructions
-
Temporary communication relay
-
Delivery of a radio, medical kit, sensor, or flotation device
-
Controlled placement of lightweight emergency equipment
This does not mean that every surveillance platform automatically becomes an intervention aircraft. Each response function must be engineered and tested around the specific payload, mission risk, release mechanism, operating procedure, and legal environment.
For UHUAV, the objective is to develop customizable systems that can move beyond observation when a customer requires a defined and technically validated response capability.
Human Oversight and In-Flight Intervention
Fully autonomous execution should never be confused with unrestricted autonomy. A reliable mission system must preserve operator oversight throughout the flight.
The operator should be able to:
-
Observe aircraft position and health
-
View live payload data
-
Receive warnings and detections
-
Pause or redirect the mission
-
Change an observation point
-
Command return-to-home
-
Assume manual control when necessary
This balance is especially important during security and public safety operations, where the environment can change quickly. A route that was valid at launch may need to be modified because of people, vehicles, weather, airspace activity, or a new incident priority.
The aircraft should execute routine tasks consistently, while critical decisions remain under human authority.
Reliable Communication with the Ground Station
Autonomous operation does not eliminate the need for a dependable communication link. The ground station remains the operator’s main source of mission visibility and control.
UHUAV systems can be configured to transmit:
-
Command and control data
-
Aircraft telemetry
-
Live EO/IR video
-
Payload status
-
Detection and tracking events
-
Mission progress
-
System warnings
-
Recorded event information
The communication architecture can be adapted to mission range, terrain, interference conditions, video quality, latency requirements, and regulatory limits.
For a border surveillance drone or long-distance infrastructure patrol, antenna configuration, RF performance, network routing, onboard processing, video encoding, and ground-station placement all affect real-world results.
Failsafe Logic and Mission Reliability
A mission-ready UAV must be prepared for abnormal conditions. Operator-defined missions can include safety rules for:
-
Low battery
-
Loss of command link
-
Loss or degradation of navigation data
-
Excessive wind
-
Payload malfunction
-
Route deviation
-
Geofence violation
-
Unexpected aircraft health warnings
The system may respond by holding position, continuing to a safe point, returning to home, changing altitude, or landing at a predefined location, depending on the platform and approved mission logic.
These behaviors must be tested for the final configuration. A custom UAV solution should not rely on generic safety assumptions when the airframe, payload, communication system, and operating environment are different.
Custom Mission Logic for Customer Requirements
Different customers define success differently. A facility-security operator may prioritize scheduled perimeter patrol. A public-safety organization may require fast dispatch and thermal observation. A border-monitoring team may need endurance and long-range EO/IR coverage. A search-and-rescue team may need target tracking, illumination, and emergency payload delivery.
UHUAV can adapt selected platforms through:
-
Custom mission planning
-
Airframe and propulsion selection
-
Payload integration
-
Onboard computer configuration
-
AI detection and tracking
-
Communication-system integration
-
Ground-control interface adaptation
-
Event-response automation
-
Testing and operational documentation
This requirements-driven process connects software autonomy with the practical limits of the aircraft and the real objective of the customer.
Applications of Operator-Defined Autonomous Missions
Critical Infrastructure Security
Autonomous patrol can support solar plants, wind farms, pipelines, ports, mines, logistics sites, and large industrial facilities by inspecting repeatable routes and rapidly verifying alarms.
Perimeter Protection
A perimeter security drone can monitor fence lines, entrances, restricted zones, and remote access routes while providing real-time video to security personnel.
Border and Wide-Area Surveillance
A border surveillance drone can execute long route segments, observe designated sectors, and coordinate EO/IR payload behavior across day and night missions.
Public Safety
A public safety drone can support police, fire, civil-protection, and emergency teams with rapid aerial assessment, thermal imagery, scene documentation, and mission-specific response payloads.
Search and Rescue
Autonomous route execution can help cover defined search grids, while thermal imaging, target tracking, lighting, loudspeaker communication, and payload delivery support teams in difficult terrain.
From Automatic Flight to Mission Autonomy
A UAV that follows waypoints is automated, but a mission-ready system must do more. It should connect flight planning, payload behavior, live intelligence, operator oversight, safety logic, and post-mission review.
At UHUAV, operator-defined missions with fully autonomous execution are part of a broader goal: developing customizable UAV systems that perform repeatable tasks, support faster decisions, and adapt to real operational requirements.
By combining VTOL capability, modular payloads, AI-assisted detection, reliable communication, and human-supervised autonomy, UHUAV aims to deliver surveillance and response platforms for critical infrastructure, perimeter security, public safety, border observation, and other mission-specific applications.


0 Comments
Add a comment